Recurrent Neural network(RNN)是一种专门处理序列的神经网络。正如CNN可以轻易地处理大规模的“网格状”数据,RNN能够处理其他网络架构都无法处理的长的序列。
Why RNN
考虑这样的问题:航空公司要从文字中提取顾客的目的地和出发地。
对于
I’ll arrive from Shanghai to ShenZhen
目的地是ShenZhen,出发地是Shanghai
而对于
I’ll arrive to Shanghai from ShenZhen
则目的地是Shanghai,出发地是ShenZhen。
使用基于地点在句中位置的方法无法解决问题。到底是出发地还是目的地,与前后的词语都有关。这些信息这称为Context(上下文)
若使用MLP,则需要在每个位置都重复的学会人类语言的规则,大量重复的参数不但使得计算代价激增,而且也显著增加over-fitting的几率。
因此,需要一种专门的结构来处理序列数据。RNN应运而生。
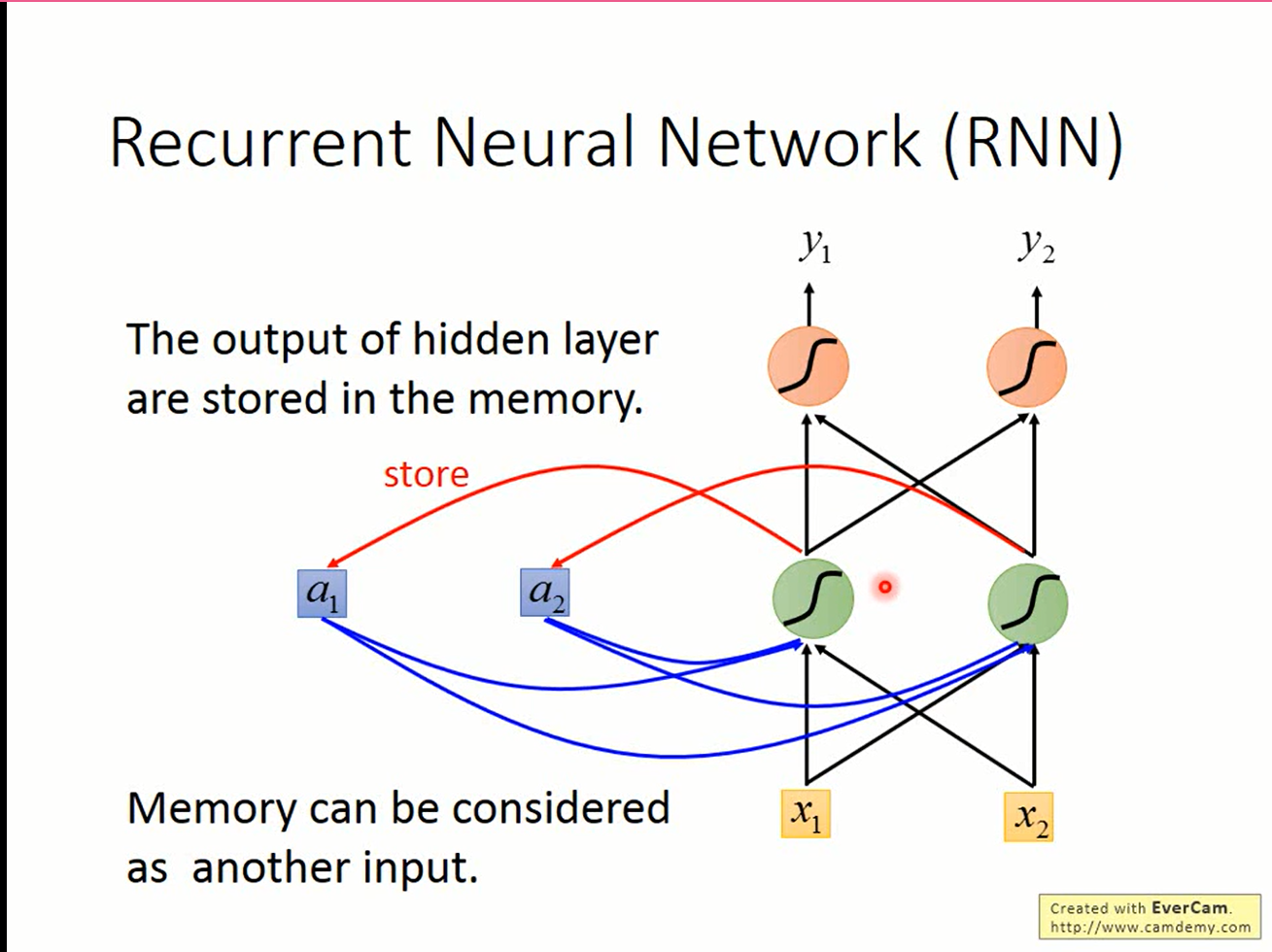
Vanilla-RNN
RNN企图使用Memory(记忆)来解决问题: 当前数据处理过程中隐藏单元的值被保留,下个数据处理时作为额外的输入,这样RNN就拥有了“记住”已经看过数据的能力。
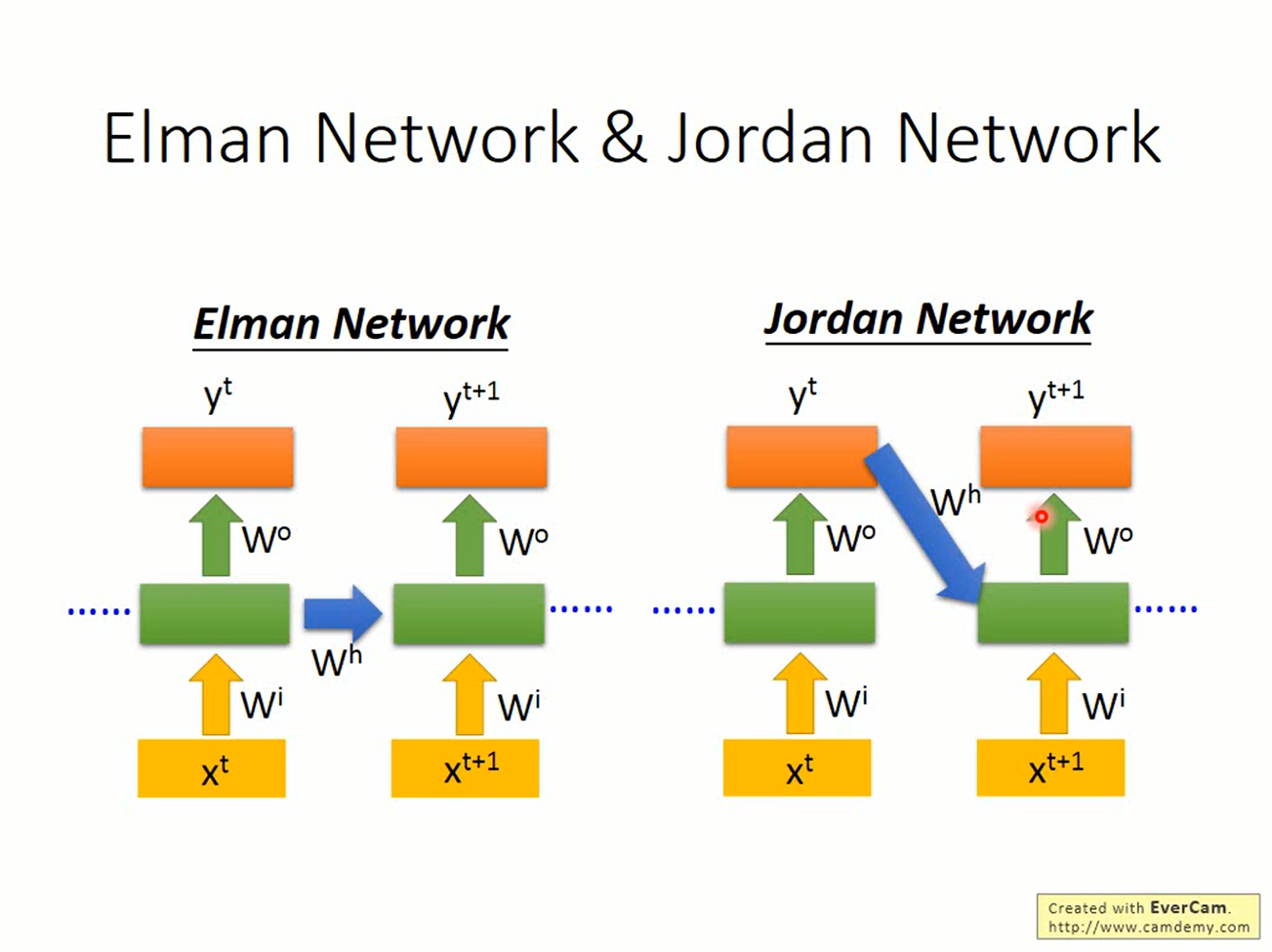
根据“记忆”的来自隐藏单元还是输出的不同,可以将RNN分为Elman network和Jordan network两种
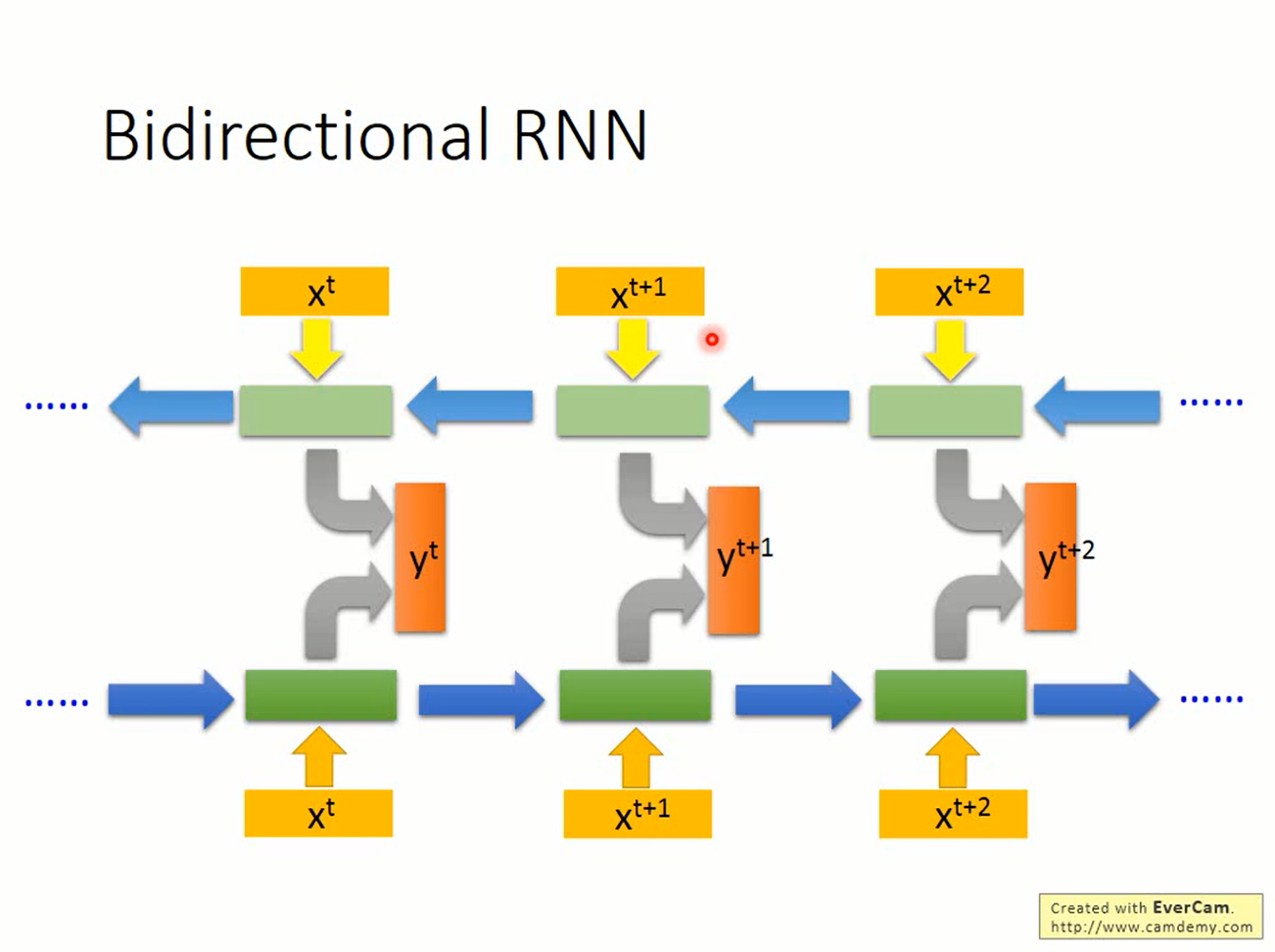
现在的RNN只能往一个方向看,有时只“往前看”的网络并不能解决问题,我们还需要“往后看”。既往前看又往后看的RNN叫做bidirectional RNN(双向RNN)
这时只要训练两个RNN:一个从前往后,一个从后往前,再把他们的输出丢到另一个MLP去做处理就可以了
Exploding/Vanishing gradients
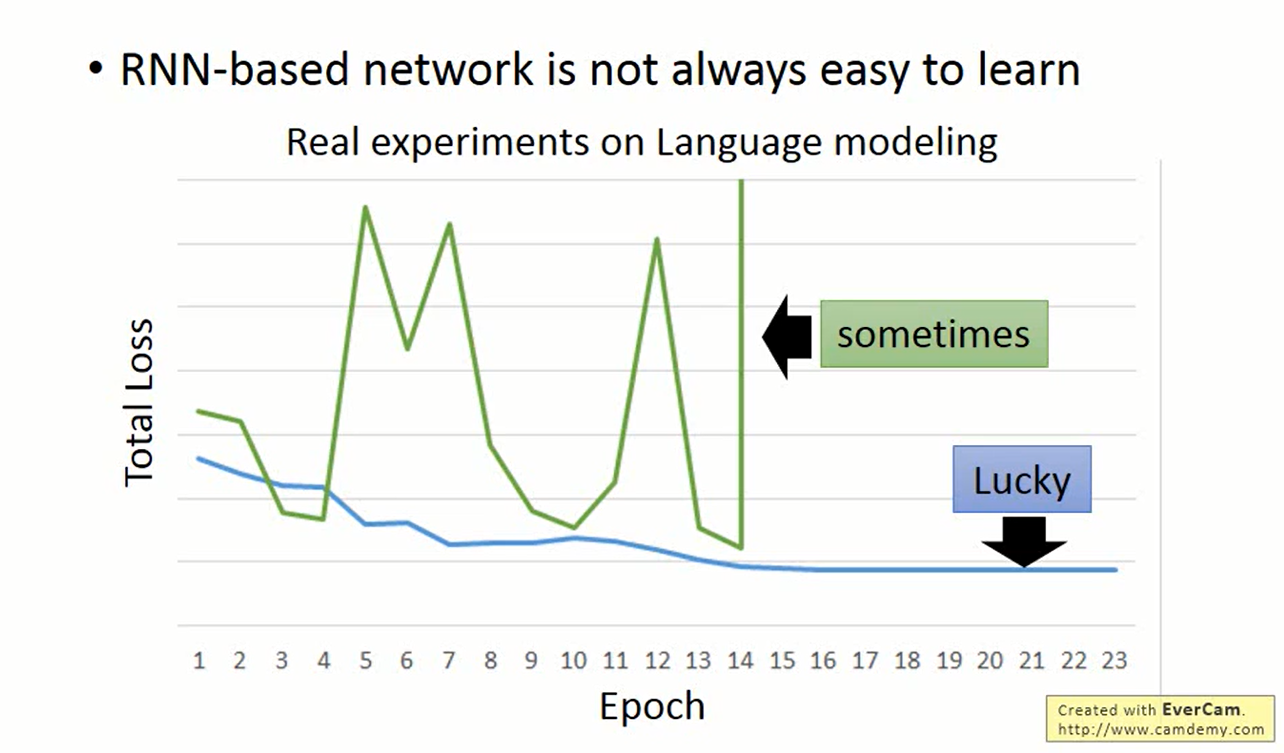
RNN的性能十分出色,但训练的过程往往困难重重。其中一个重要的因素就是Exploding/Vanishing gradients(梯度爆炸/消失)。
 在RNN中,t-1时刻的隐藏单元的输出会影响到t时刻的隐藏单元。
在RNN中,t-1时刻的隐藏单元的输出会影响到t时刻的隐藏单元。
重复使用这个式子,则
$$ h^{t}=W^t\prod_{i=1}^{i=t}h_{i} $$若W可进行特征值分解,则
$$ W=Q^{\top}A Q \\ W^t=Q^{\top}A^{t}Q $$- 若W的特征值λ>1,则经过t次相乘后,λ^t的值会变得非常大(梯度爆炸)。
- 若λ<1,则经过t次相乘后,λ^t的值会变得非常接近零(梯度消失)
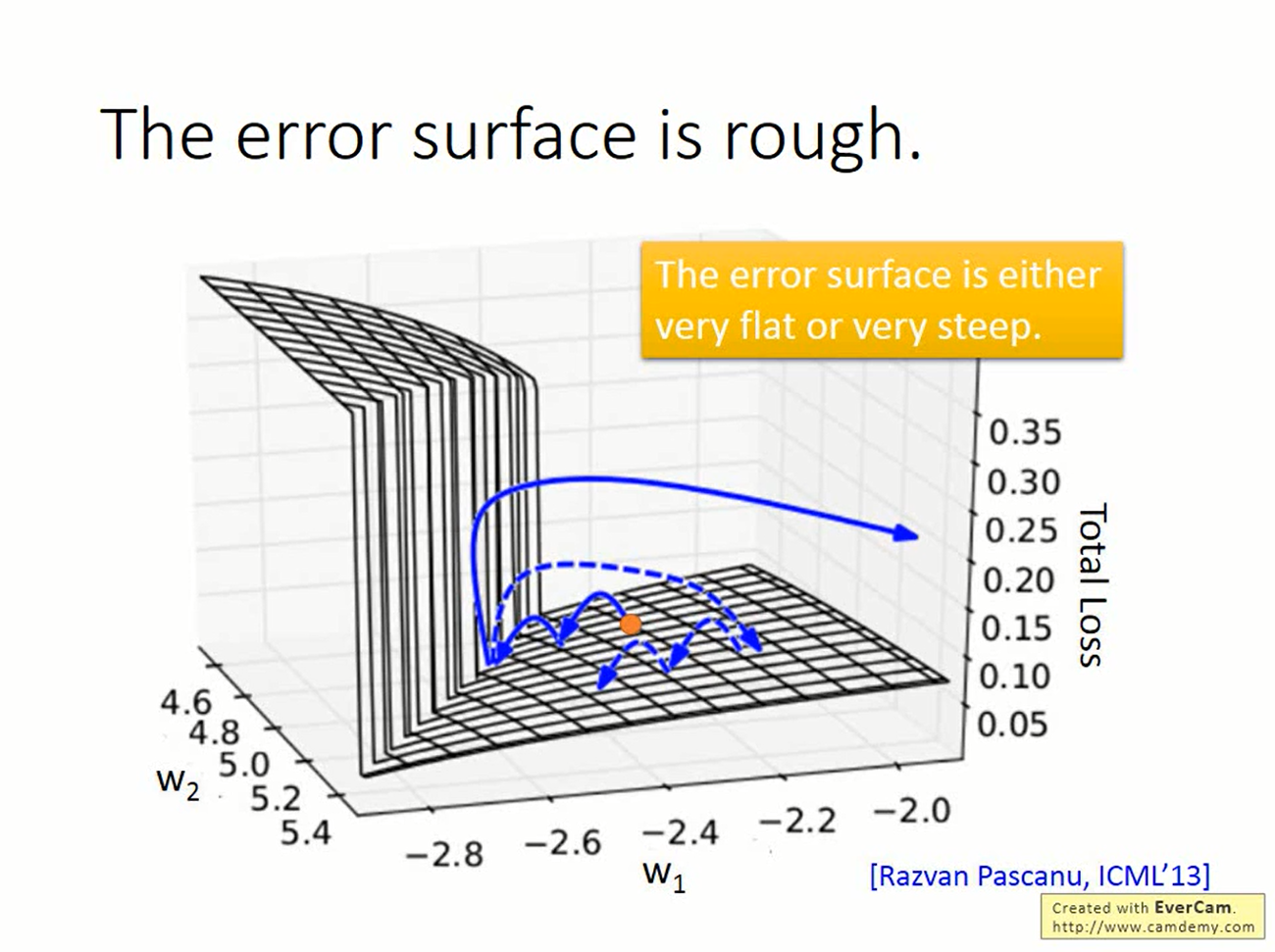
梯度爆炸/消失对梯度下降法的干扰非常大,以至于训练过程中出现匪夷所思的结果
解决这个问题的关键在于给“记忆”可变的权重。
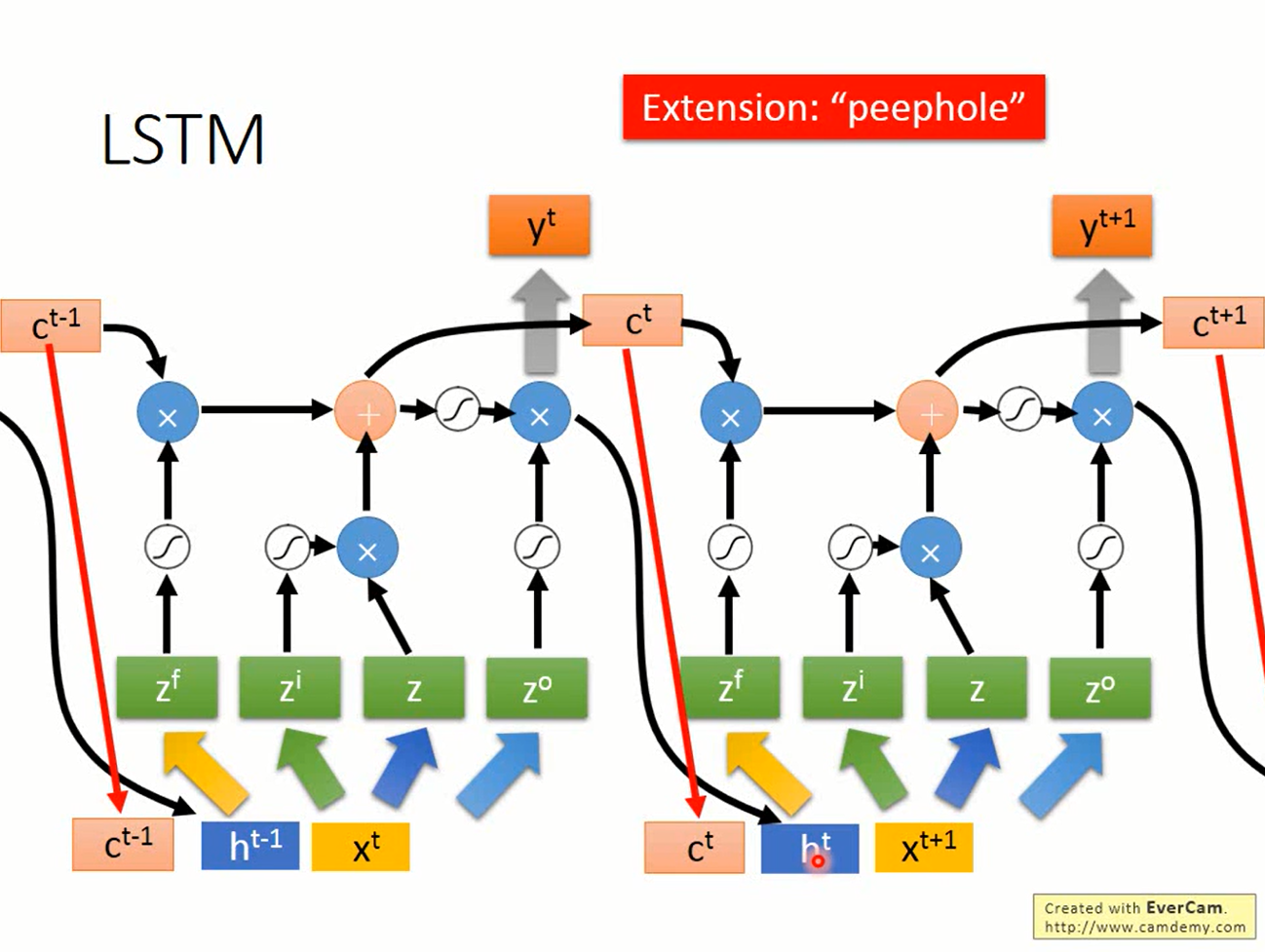
LSTM
Long short-term memory(长短期记忆)是一个解决梯度爆炸/消失问题效果较好的方案。
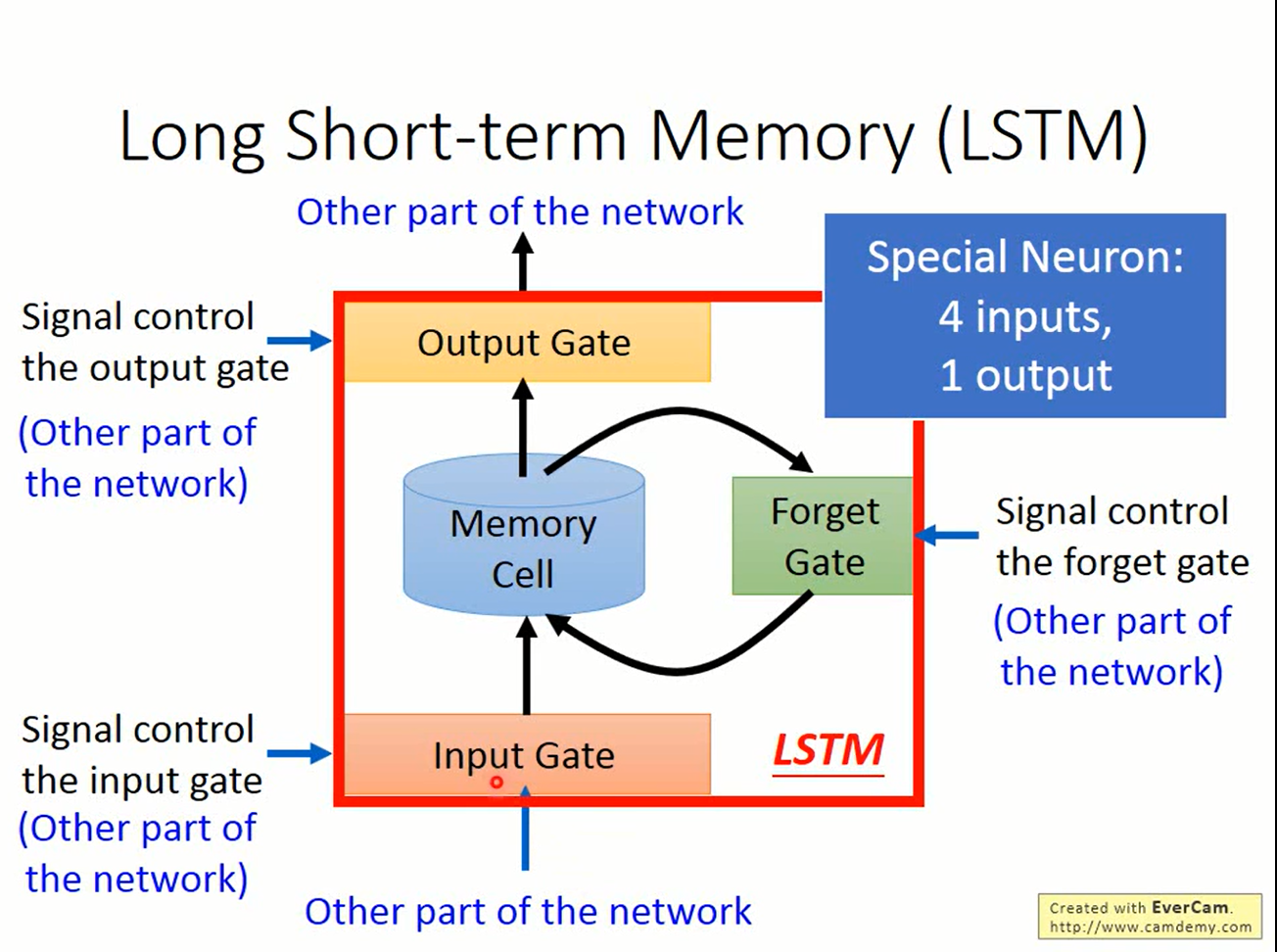 在LSTM中,在存储“记忆”的地方(cell)加上了三个gate:
在LSTM中,在存储“记忆”的地方(cell)加上了三个gate:
- input gate
- output gate
- forget gate
这些gate的控制信号经过sigmoid函数后得到的0~1之间的数值表示这些门“打开”的程度
- input gate决定“记忆”是否接受新的输入
- output gate决定“记忆”是否被读出
- forget gate决定“记忆是否被遗忘”
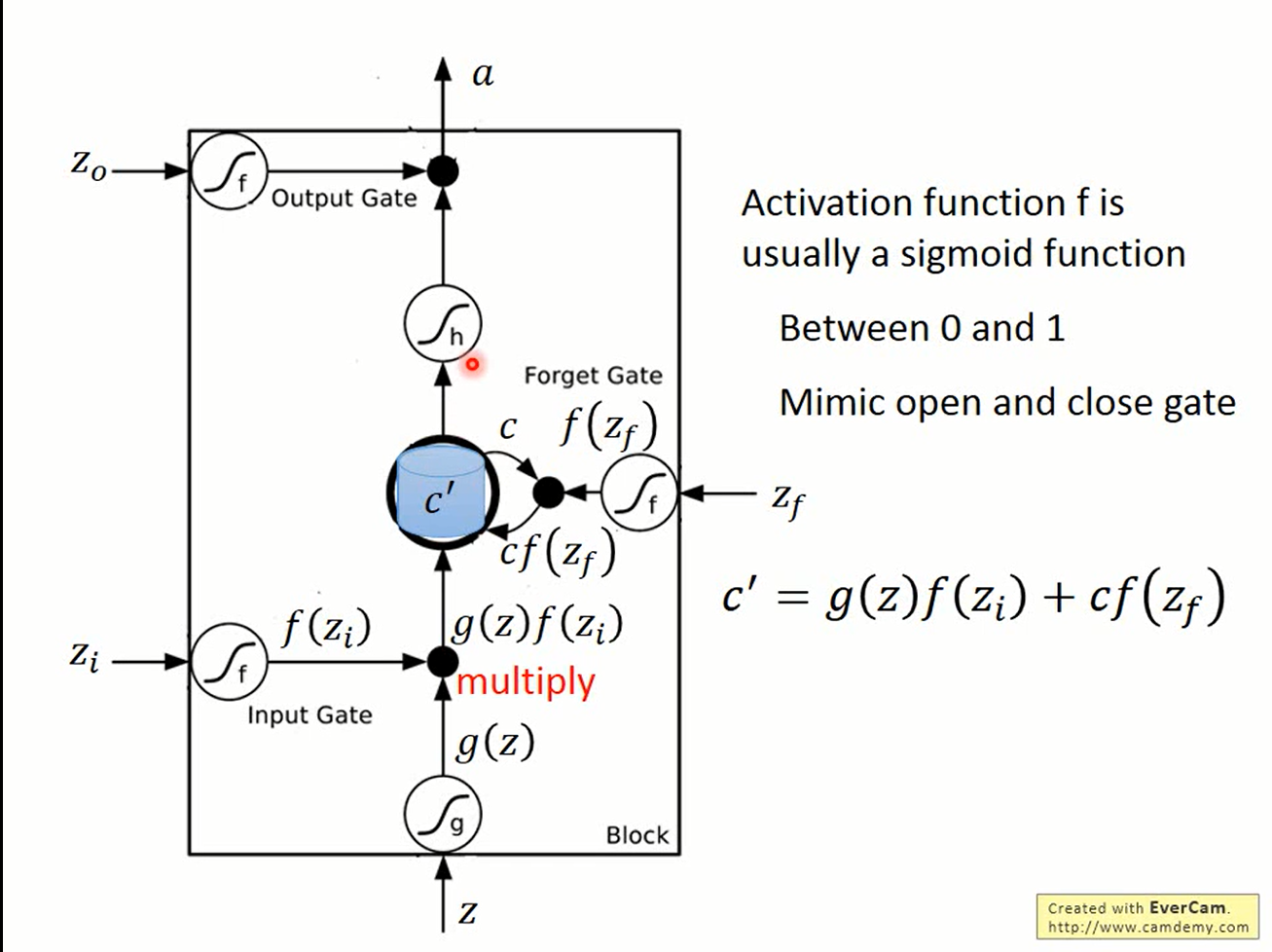
图中z是输入,zi,zo,zf分别是上述三个gate的控制信号。
设原来存储在“记忆”中的值为c,则新的值c’如此产生
- 输入z经过激活函数的值g(z)与input gate的值相乘,得到g(z)*f(zi)
- 原来“记忆”中的值c与forget gate的值相乘得到c*f(zf)
- 将输入与原“记忆”相加的结果作为新的记忆c’=g(z)f(zi)+cf(zf)
- 新的值c’与output gate的值相乘得到c’*f(zo),结果作为“记忆”的输出
其中zi,zo,zf是网络的参数,由训练过程中自己学得。将多个LSTM的cell连接起来,就得到了能够处理复杂问题的RNN。当然在实际使用中,zi,zo,和zf也可以接受网络其他部分的参数 ,这就要看具体的问题了。