任何一个机器学习的任务都可以被拆解为三步
- 找到一组函数(model)
- 找到评价函数好坏的标准(loss)
- 找出最好的函数(optimization)
这三步在神经网络中同样成立。但在神经网络中,要找的不是一组函数,而是一种网络架构(architecture)。本文中的卷积神经网络(CNN)就是一种网络架构
根据universal approximation theorem,MLP已经足够表达任意函数。而在实际中,因为相邻层级的神经元之间的任意互联导致MLP容易过拟合。而在处理一些具有结构化的输入时,MLP中又会有大量的参数重复。为了解决这些问题,引入了CNN。
Why CNN?
考虑这样一个问题:如何让机器认出图片里的一张鸟?
回顾人类的思考过程,若图片中的物体具有鸟的基本特征,如喙、翅膀和爪,则认为它是鸟。在这个过程中,我们并不关心翅膀在图片中的位置:只要有喙就可以了。对翅膀和爪也是同样成立。
继续思考,怎么认出喙?喙可以由它的边界(geometry)来定义:两条斜线围成的尖尖的多西。翅膀和爪也可以有对应的边界来定义。同样的,我们并不关心边界出现的位置,只要它能确定这个物体是个喙就可以了。
实际上这就是CNN出现的动机之一:我们只关心一些模式是否出现,而不关心它们出现的位置。换句话说,我们所期待的模式会在图片的不同区域出现。
回到图像的例子上,人们发现了三个属性:
- 比起整张图片,模式通常是比较小的
- 相同的模式会在不同的区域出现
- 对图片做subsampling(如删掉奇数行和偶数列)并不会改变图中的物体
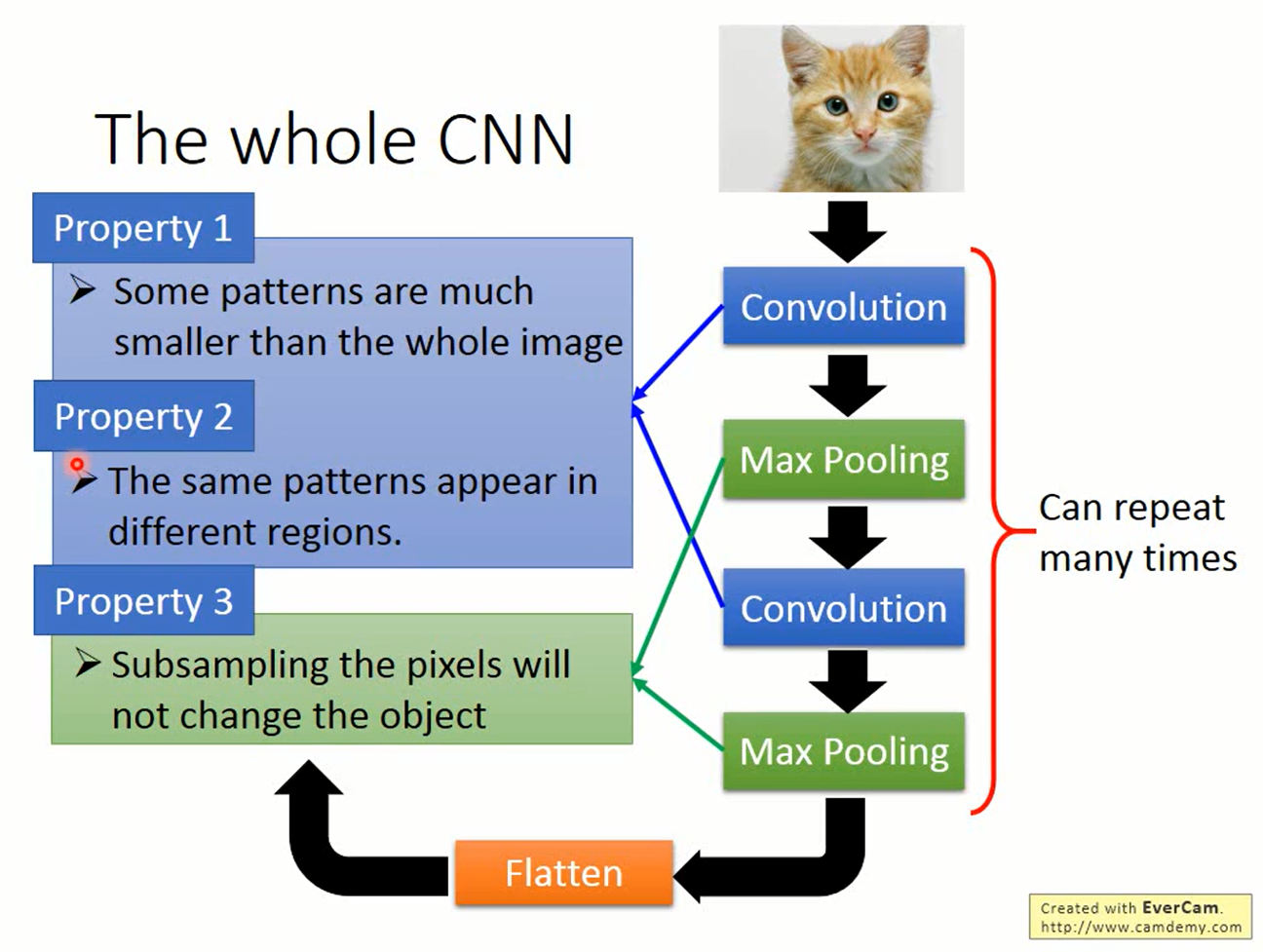
基于这三种属性,人们提出了convolution和pooling两种操作。convolution对应属性1、2,pooling对应属性3。convolution和pooling交替就是CNN的架构。
Convolution
Convolution的基础单位是filter(kernel)。filter是一个矩阵,用来检测模式
考虑如下的情景
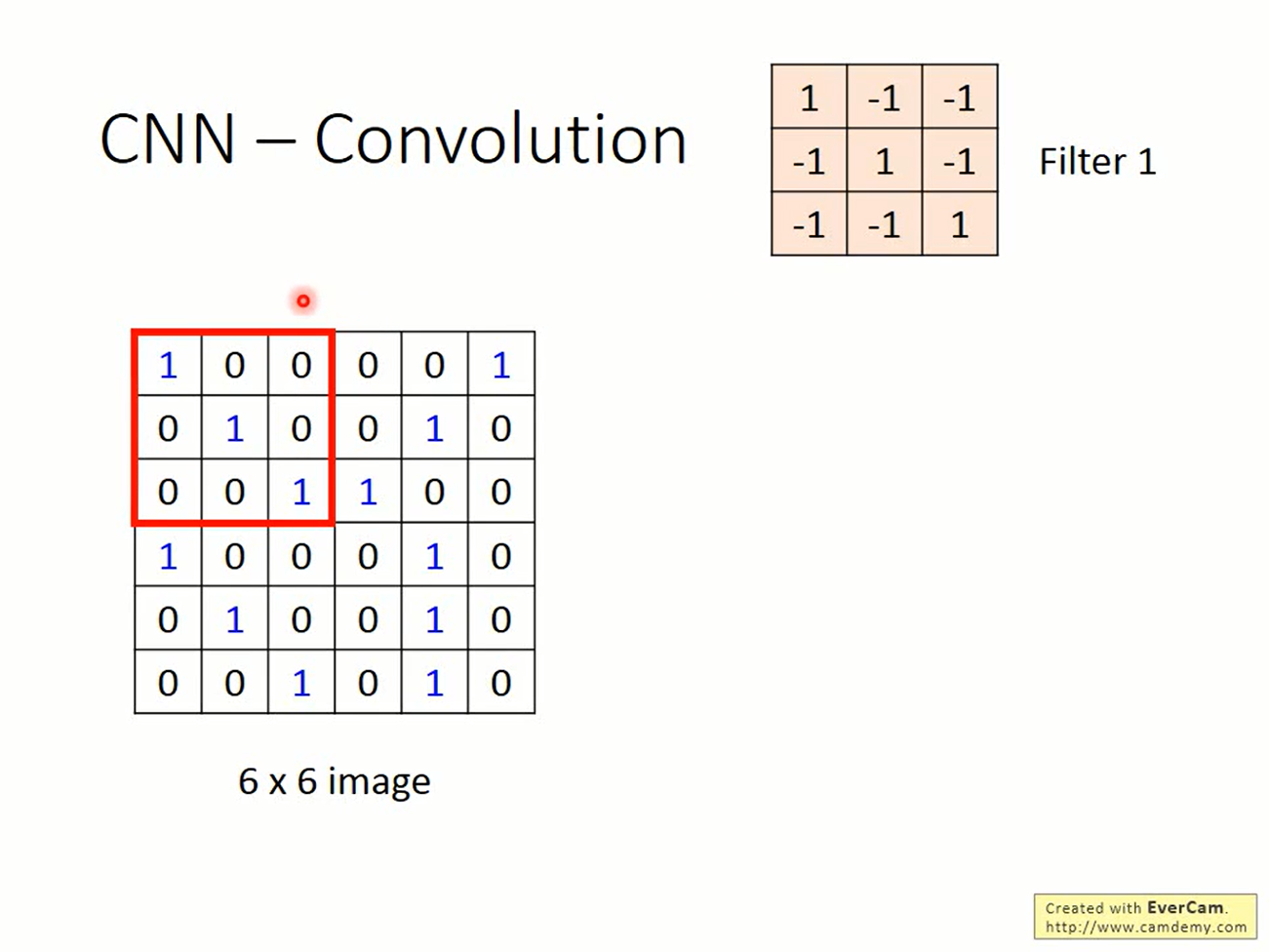
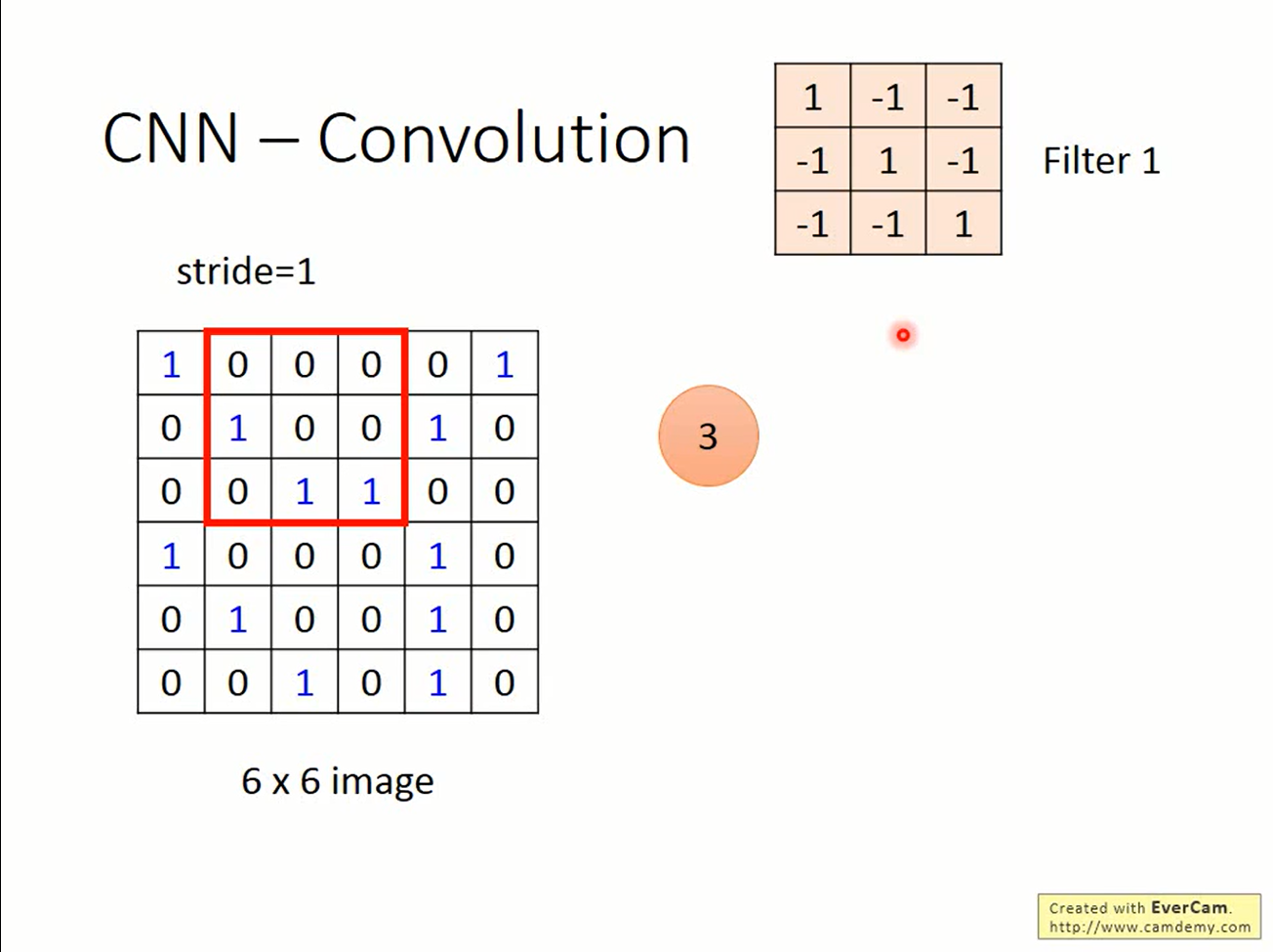
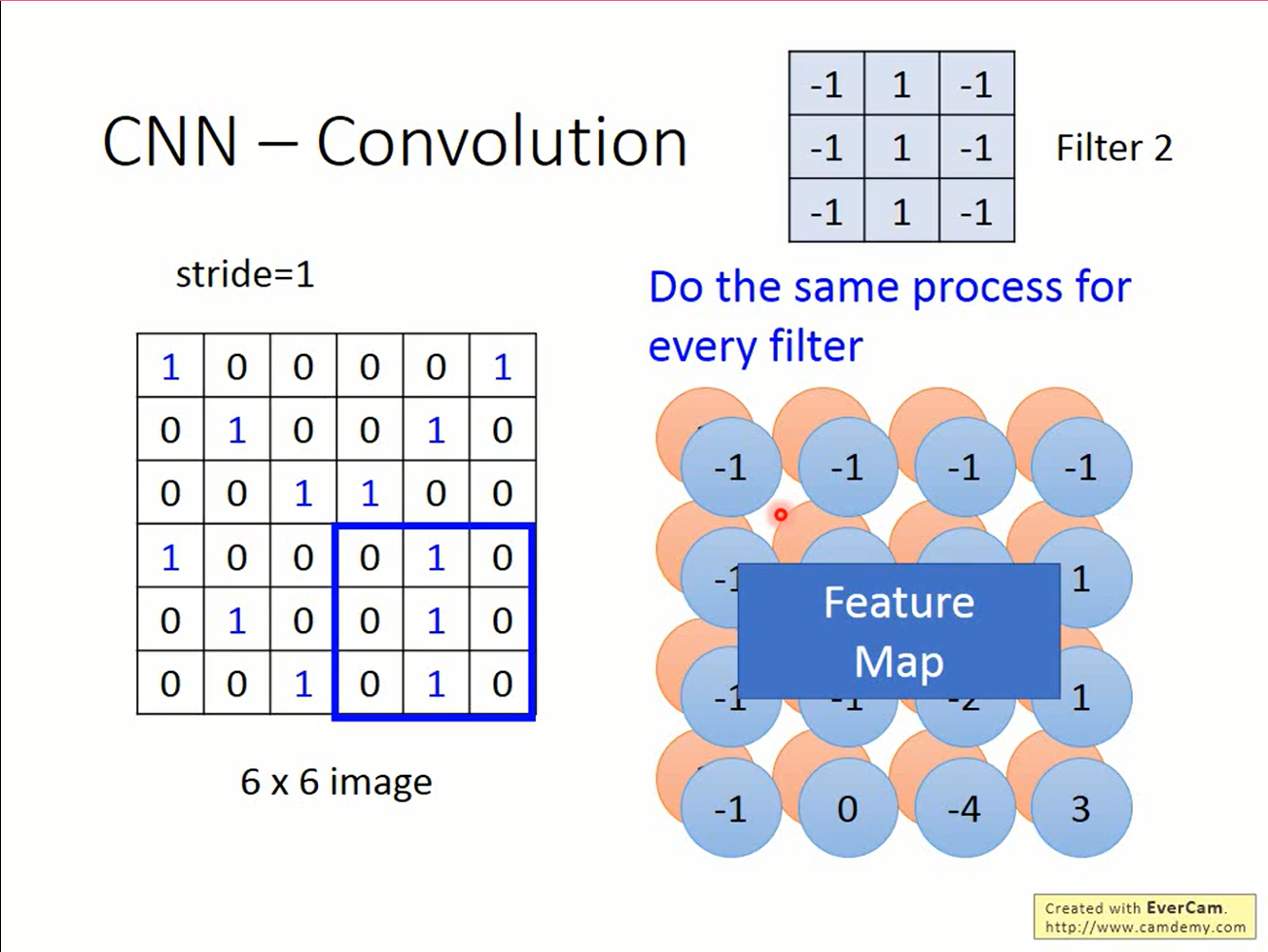
输入是6*6的图片,filter是3*3的矩阵。在图片的左上角找到一个与filter一样大的矩阵,做element-wise product,会得到一个数值。将filter往右移动一格,继续这个步骤,就又得到新的数值。移动的距离称为stride(步长)
filter通常比输入更小,而filter在移动的过程中可以在不同的位置上检测出对应的模式。这就体现了属性1和2。
filter移动完毕后会得到一个新的矩阵。我们可以使用多个filter,将这些filter的输出放在一起会得到一个三维的张量,称为feature map.
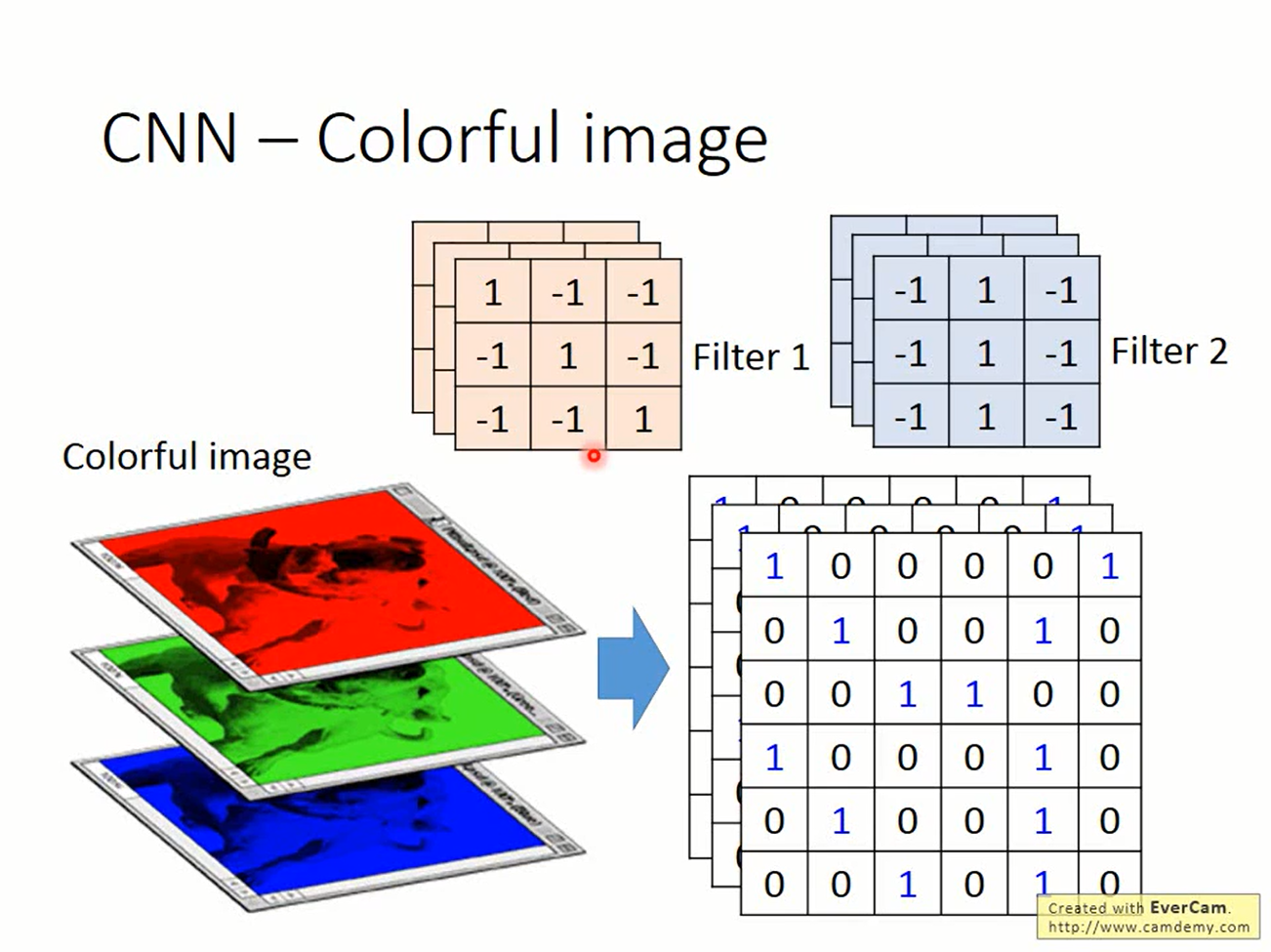 输入也不一定是黑白的。若输入彩色图片,则需要一个三维的张量来表示
输入也不一定是黑白的。若输入彩色图片,则需要一个三维的张量来表示
这时的filter也是一个三维张量。 这里的重点是,不管输入是什么样,filter的“z轴”要与输入的“z轴”一样高,然后在其他轴上以stride移动,得到的标量集合起来成为新的张量作为下一层的输入。 Convolution得到的feature map会缩小,这可以补零(zero padding)来避免
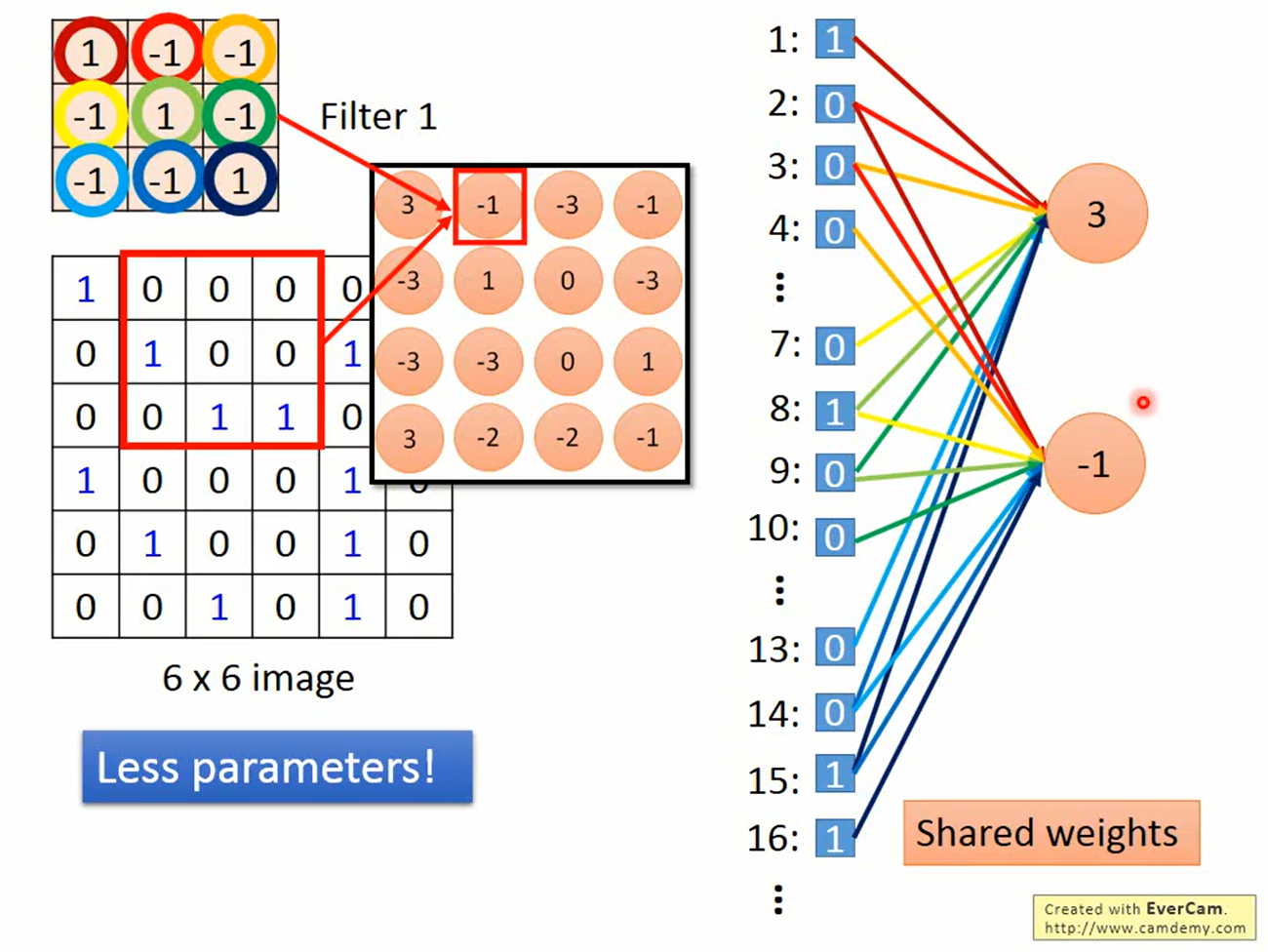
实际中通过在MLP中共享参数来实现。使用了更少的参数来做同样的事情就不容易过拟合。
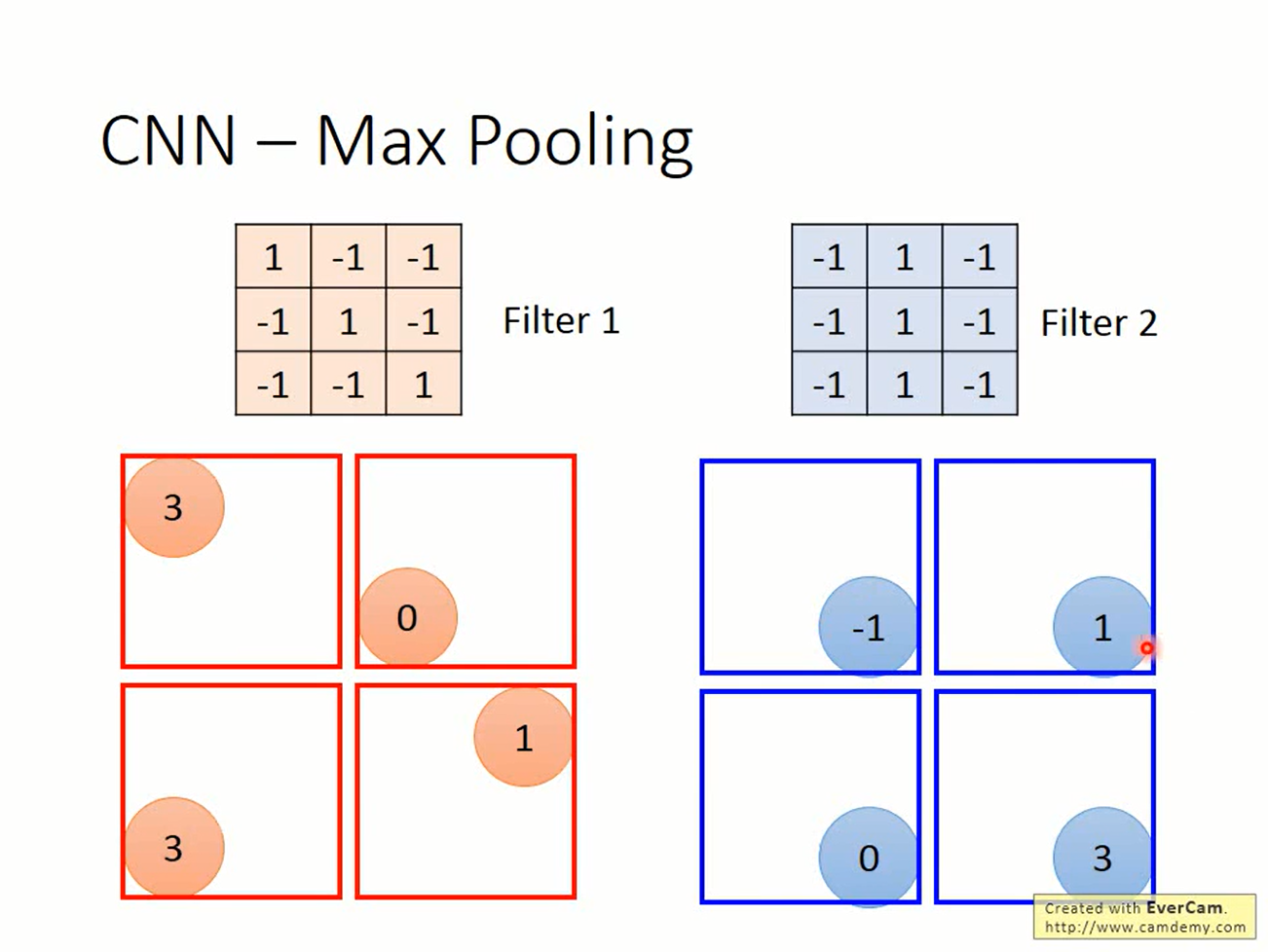
Pooling
Pooling的思路更简单了。对一些区域进行采样,得到一张更小的image,这就是属性3。
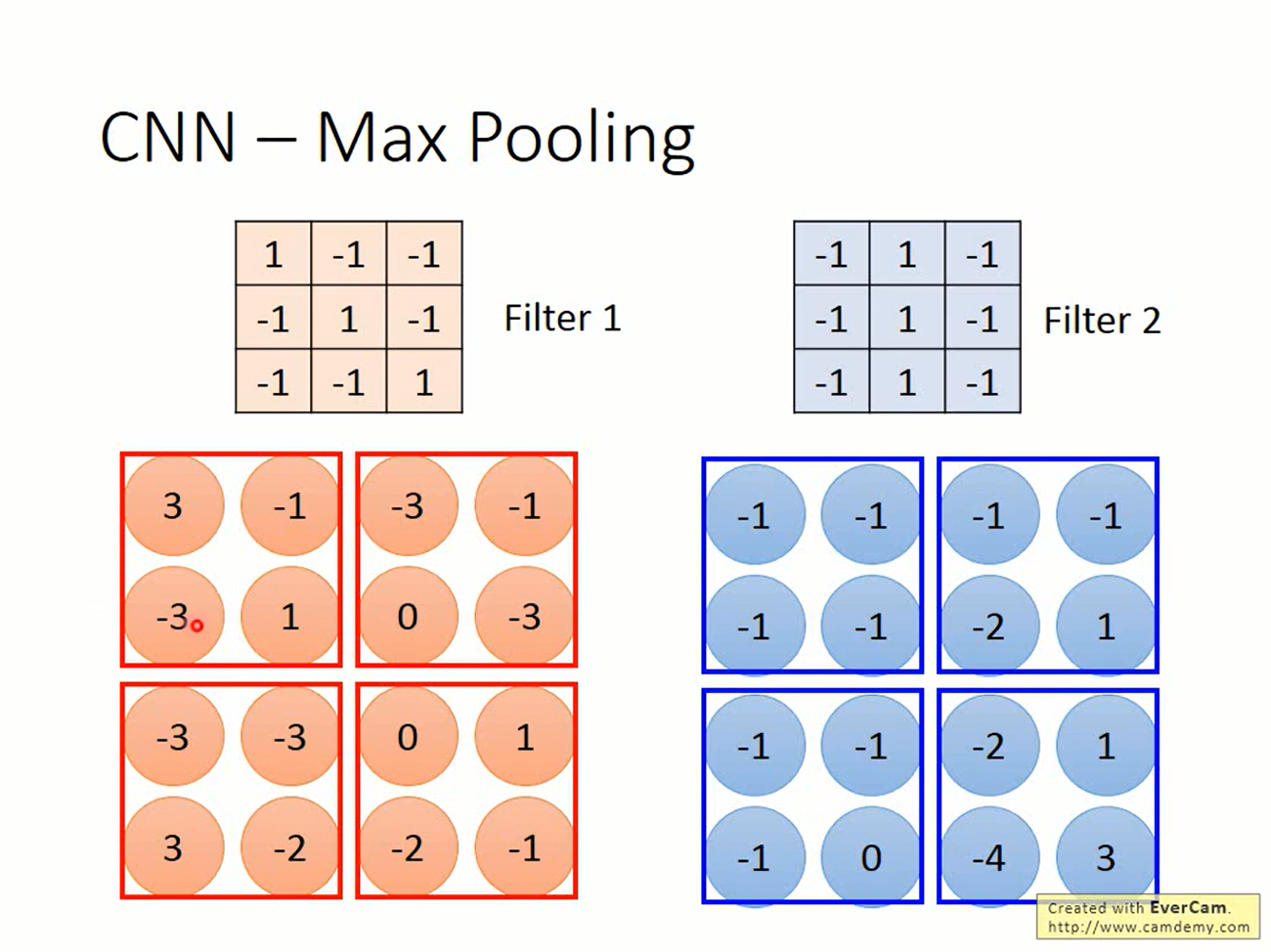
pooling有很多选择,可以取算术平均,可以取L2 norm。一般比较常见的是max pooling。
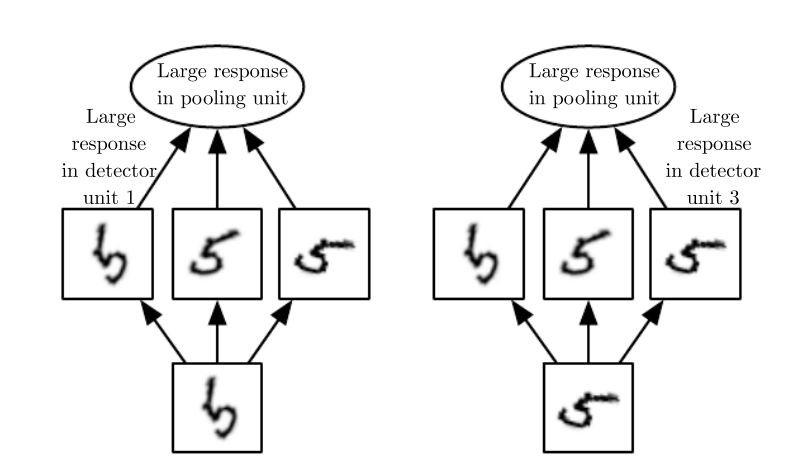
通过pooling,网络就可以对输入中比较规律的变化不那么敏感。这称为invariance。
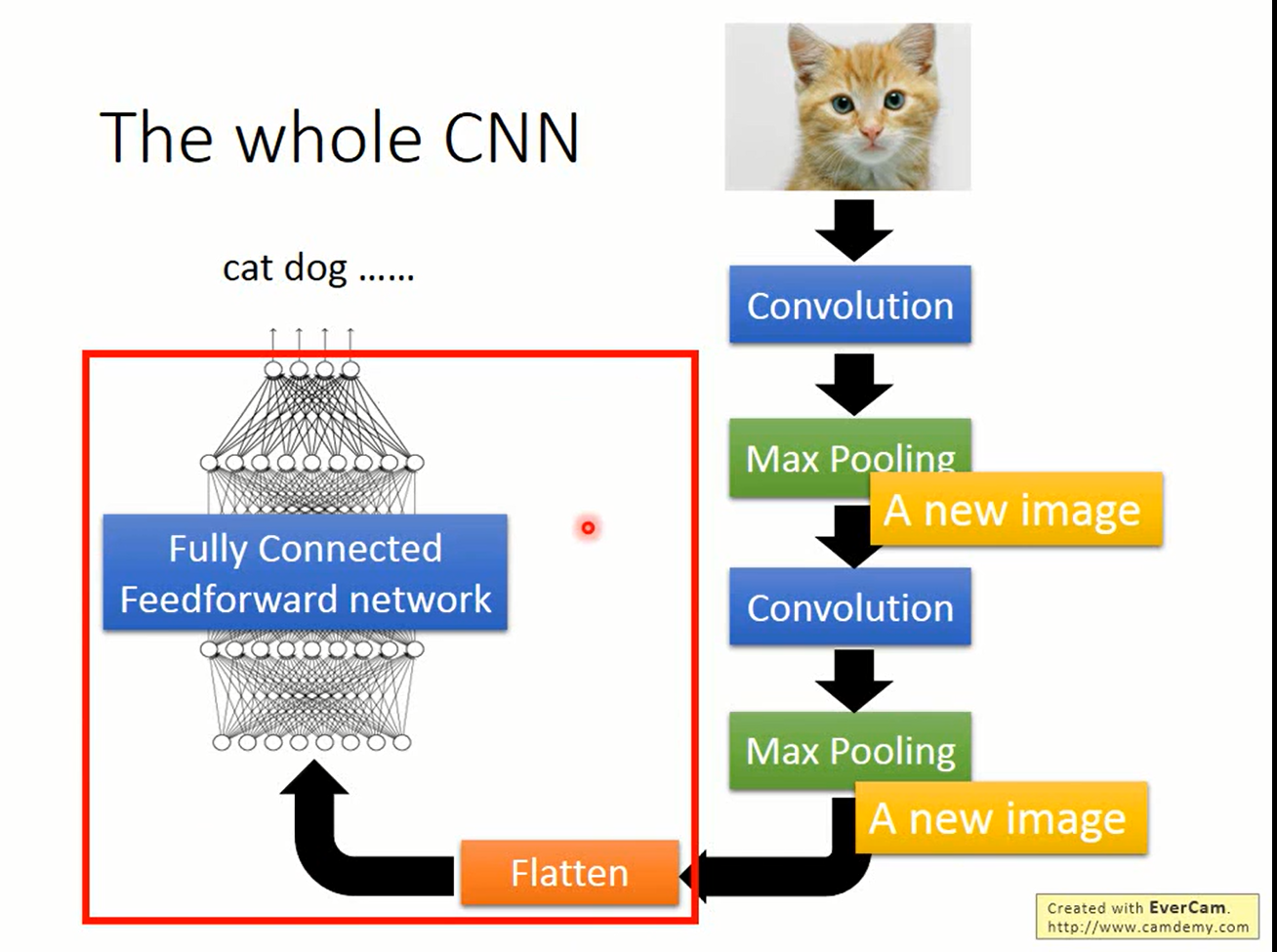
Flatten
做完pooling后得到的是一个张量。把它“拉直”成一个向量,丢给MLP就可以实现我们所要做的事情了。
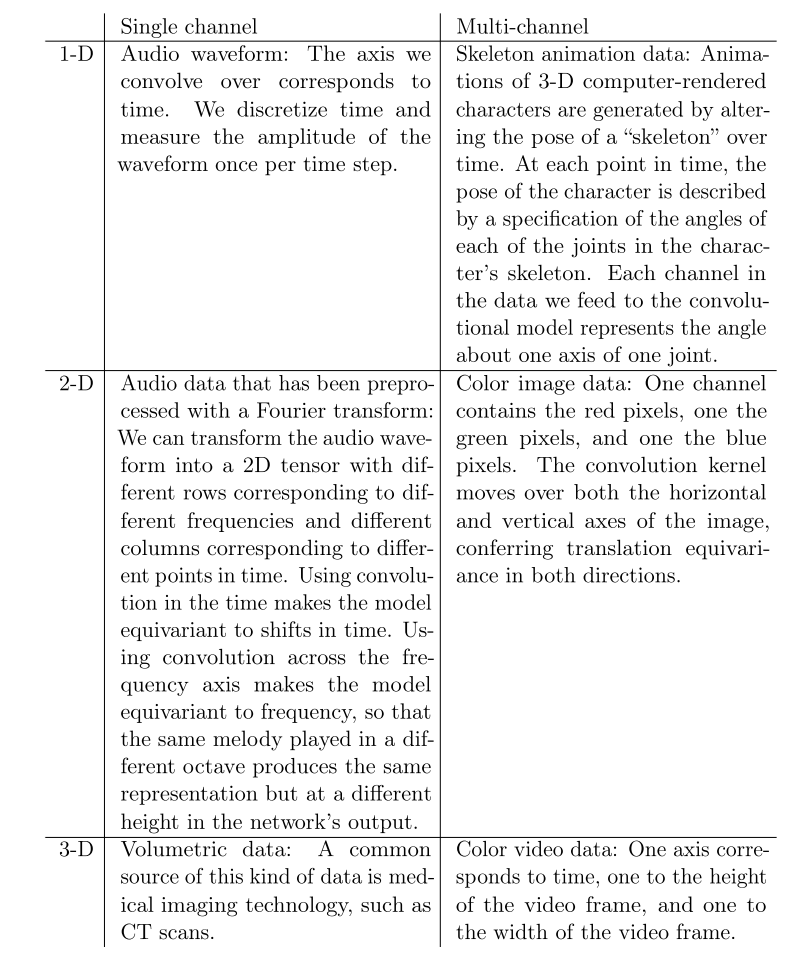
CNN并不只能用于图像处理,只要要处理的问题具有上述的三个属性,就可以用CNN来解决。
下面是一些用CNN效果比较好的任务: